


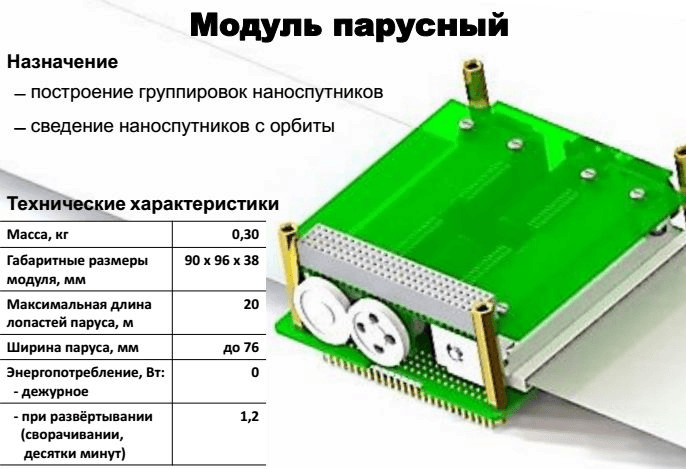
Характеристики парусного модуля
Базируясь на технологиях, которые планируется отработать на МКС в рамках КЭ «Парус-МГТУ» в рамках научно-образовательной деятельности нами предложен стандартный модуль, который может быть интегрирован в любой наноспутник (возможно, с некоторой доработкой, потому что все они внутри устроены по-разному…).
Модуль построен как законченное устройство, встраиваемое в базовый аппарат с минимальным числом интерфейсов.
Базовый аппарат обеспечивает:
- электропитание (от 3 до 5 В, может быть не стабилизированным)
- трансляция команд на раскрытие и закрытие паруса с НКУ по цифровому интерфейсу (I2C, SPI, UART, CAN)
- закрутку аппарата перед раскрытием паруса до необходимой угловой скорости (см. раздел про построение группировок, в конце).
Модуль парусный обеспечивает:
- автономное управление развёртыванием (сворачиванием) паруса
- телеметрическую информацию о жизненных показателях модуля.
Электропитание модулю требуется только на тех этапах, на которых происходит развёртывание или сворачивание паруса, которое занимает не более нескольких десятков минут. В остальное время модуль может быть обесточен при условии обеспечения температурного режима хранения (см. выше на слайде).
Основные сведения о конструкции
Конструктивно модуль состоит из двух печатных узлов, на одном из которых размещается вся электроника, двух катушек с лентами паруса и крепежа.
В данной конструкции для изготовления корпусов катушек мы использовали 3д печать из полиамида. Это позволило значительно снизить массу модуля и в разы снизить стоимость изготовления.
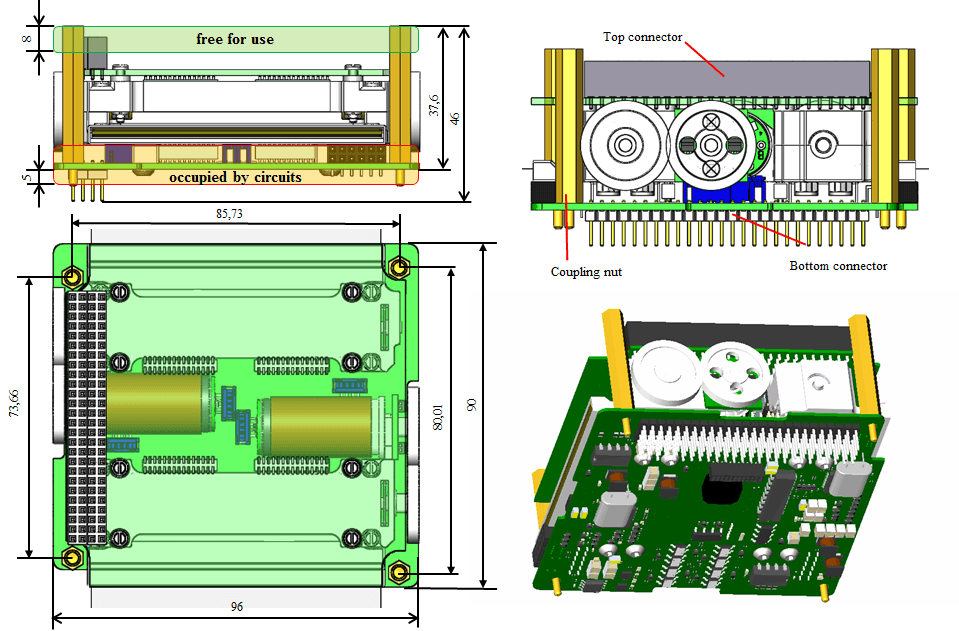
Габаритный чертеж модуля
Проведённые расчёты на прочность показали, что мы обеспечиваем коэффициент запаса прочности более 4 для этапа выведения в составе РН. Расчёты проводились конечно по упрощённой схеме (учитывался только сам модуль, без кубсата целиком, контейнера и т.д.), однако такой большой коэффициент запаса позволяет быть уверенным в том, что мы обеспечим прочность изделия.
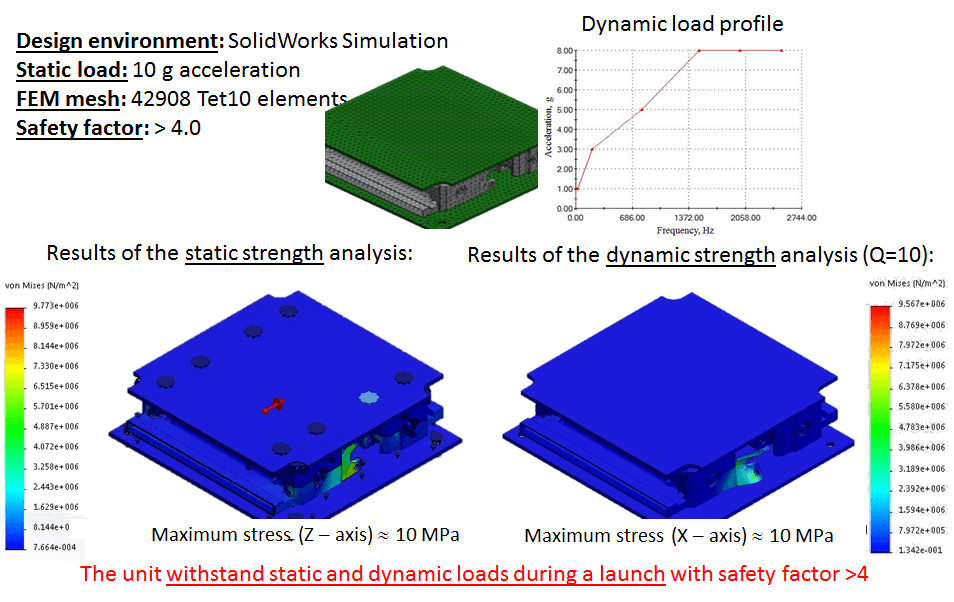
Результаты расчета на прочность
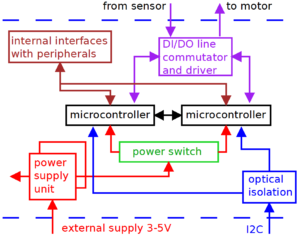
Контроллер
Для независимого управления развёртыванием (сворачиванием) паруса мы решили включить в состав модуля полноценные мозги, чтобы не загружать систему управления базового аппарата своими проблемами.
Ещё до начала разработки мы решили попробовать по максимуму использовать отечественные электронные компоненты класса industrial и это получилось за исключением нескольких позиций (мэмс-гироскоп, flash-память), которые не являются критичными для функционирования модуля.
Электроника обеспечивает:
- формирование стабилизированных шин питания 3,3 В и 5 В из внешнего нестабилизированного питания от 3 до 5 В;
- приём команд по цифровому интерфейсу (I2C, UART, SPI, CAN) от базового корабля, передача базовому кораблю телеметрии по запросу;
- управление всем процессами развёртывания (сворачивания) паруса, в т.ч. контроль процесса развёртывания;
- устойчивость к одному произвольному отказу.
Ядром электроники является микроконтроллер К1986ВЕ92QI от ЗАО ПКК «Миландр».

Авторы раздела:
- Екатерина Тимакова
- Максим Корецкий
- Арсений Кузнецов
- Юлия Смирнова
- Кирилл Фролов